VD-Link 通信 / 映像伝送設定¶
SparkNavi VD-Link-S は Microhard 系列無線モジュールに基づく デュアルバンド(2.4 GHz + 900 MHz) 長距離無線データリンクで、有効距離 5 km、以下を同時伝送できます:
- 遠隔測定データ(MAVLink、SparkNavi Blue フライトコントローラーから)
- 可視光 IP カメラ映像(WAN ポート経由)
- サーマル / IR カメラ映像(LAN ポート経由)
本ガイドではハードウェア配線、Microhard 設定、映像ストリーミング、TX Power 調整までの全フローを扱います。

⚠️ 重要な安全警告(必読)¶
コネクタを誤接続するとフライトコントローラーが永久損傷します
VD-Link の TELEM、WAN、LAN 3 つのポートはすべて 電圧出力機能を備え、すべて 同じ GH1.25 コネクタ規格 を使用しています。
WAN または LAN コネクタをフライトコントローラーの TELEM1 / TELEM2 ポートに接続することは厳禁 です。これによりフライトコントローラーは 永久損傷 します。
配線時は必ず ポートラベル と ピン定義 を確認してください。SparkNavi Blue の TELEM1 に接続できるのは TELEM コネクタのみです。
システム構成¶
VD-Link は Sky 側(機体)+ Ground 側(地上 GCS)の 2 モジュール設計、全信号 AES 暗号化 です:
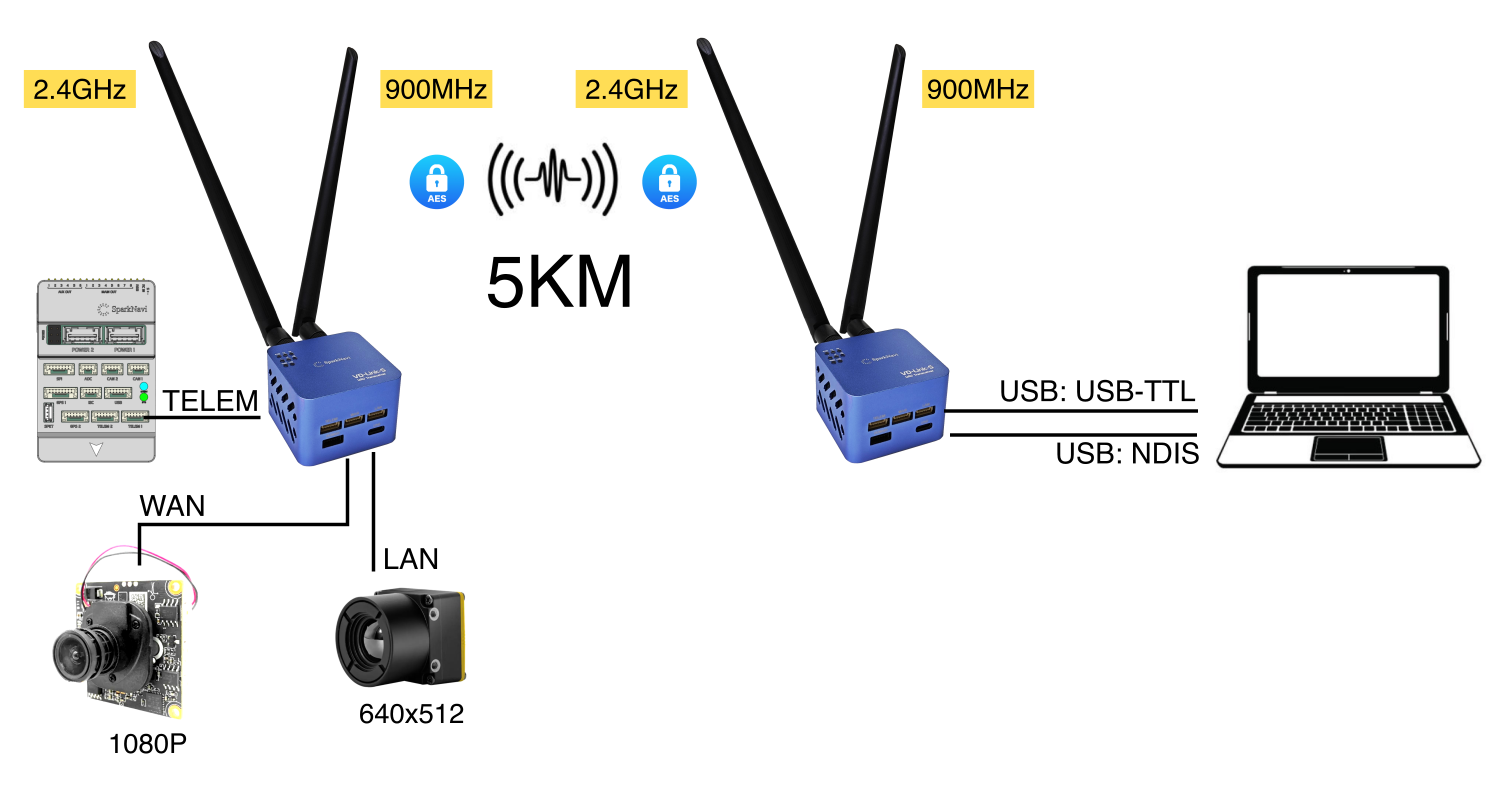
| コンポーネント | 機体側 | 地上側 |
|---|---|---|
| フライトコントローラー | SparkNavi Blue → TELEM | — |
| 1080P IP カメラ | → WAN | — |
| 640×512 サーマルカメラ | → LAN | — |
| GCS PC | — | USB-TTL(遠隔測定)/ USB-NDIS(映像) |
ハードウェアポート構成¶
VD-Link モジュール底面のポート:
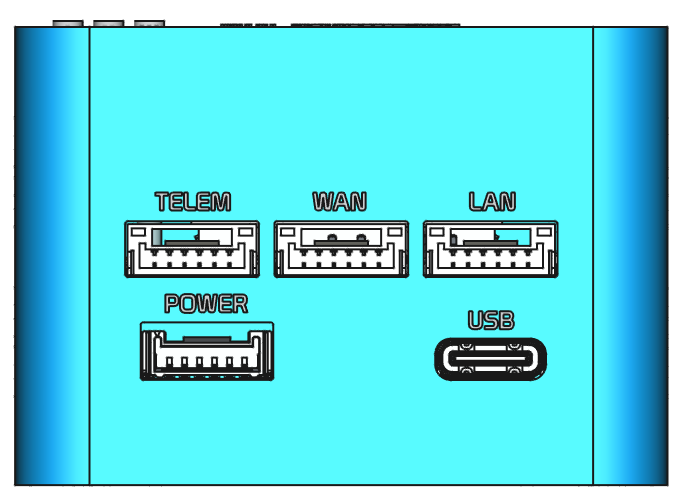
| ポート | 用途 | コネクタ規格 |
|---|---|---|
| TELEM | FC 遠隔測定(SparkNavi Blue へ接続) | GH1.25 6-pin |
| WAN | IP カメラ(可視光) — RTSP ストリーム | GH1.25 6-pin、+12V 出力あり |
| LAN | サーマル / 二次映像 — RTSP ストリーム | GH1.25 6-pin、+12V 出力あり |
| POWER | 電源入力(最大 +55V / 12S) | GH1.25 |
| USB | 地上 PC USB Type-C(NDIS ネットワーク + USB-TTL 遠隔測定) | USB-C |
アンテナ割当¶
| アンテナポート | 周波数帯 |
|---|---|
| ANT1 | 2.4 GHz |
| ANT2 | 900 MHz |
デュアルバンド設計により単一周波数の干渉を回避でき、いずれかの周波数帯が失効した場合は自動的に他方に切り替わります。
完全配線図¶
機体側の典型的配線:SparkNavi Blue + 可視光 IP カメラ + サーマルカメラ

各 GH1.25 コネクタのピン定義:
| Pin | TELEM | WAN | LAN | POWER |
|---|---|---|---|---|
| 1 | +5V | +12V | +12V | BAT+ |
| 2 | RX (Input) | TX+ | TX+ | BAT+ |
| 3 | TX (Output) | TX- | TX- | BAT+ |
| 4 | × | RX+ | RX+ | GND |
| 5 | × | RX- | RX- | GND |
| 6 | GND | GND | GND | GND |
⚠️ 再注意:WAN / LAN の Pin 1 は +12V 出力(カメラ電源用)です。誤って FC TELEM に接続すると、12V がフライトコントローラーの 5V ロジック回路に直接印加されます。
管理インターフェースログイン¶
地上側 VD-Link を USB Type-C で PC に接続すると、Windows は自動的に リモート NDIS 互換デバイス として認識し、IP を自動取得します(通常 192.168.168.x ネットワーク)。
NDIS リンク速度は 425 Mbps に達し、デュアル高解像度映像を伝送するのに十分です:

ブラウザで Microhard 管理インターフェースにアクセス:
| 項目 | デフォルト値 |
|---|---|
| URL | http://192.168.168.1(機器底面ラベルを優先) |
| ユーザー名 | admin |
| パスワード | sparknavi |
初回ログイン後、必ずデフォルトパスワードを変更してください
出荷時のデフォルトパスワードは公開情報です。正式運用前に必ず Admin → Change Password で強力なパスワードに変更してください、さもなければ同ネットワークセグメント内の誰でもリンクを操作できる状態になります。
Microhard Master 設定(地上側)¶
Microhard 管理インターフェース → Serial → Settings:
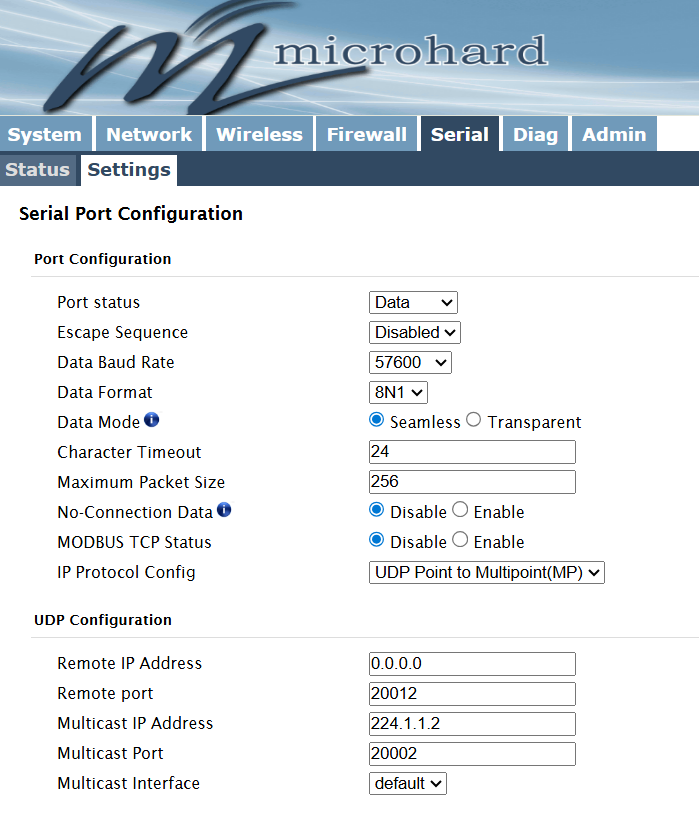
Port Configuration¶
| 項目 | 値 |
|---|---|
| Port status | Data |
| Escape Sequence | Disabled |
| Data Baud Rate | 57600 |
| Data Format | 8N1 |
| Data Mode | Seamless |
| Character Timeout | 24 |
| Maximum Packet Size | 256 |
| No-Connection Data | Disable |
| MODBUS TCP Status | Disable |
| IP Protocol Config | UDP Point to Multipoint(MP) |
UDP Configuration¶
| 項目 | 値 |
|---|---|
| Remote IP Address | 0.0.0.0 |
| Remote port | 20012 |
| Multicast IP Address | 224.1.1.2 |
| Multicast Port | 20002 |
| Multicast Interface | default |
Microhard Slave 設定(機体側)¶
機体側 VD-Link の Microhard 管理インターフェース → Serial → Settings:
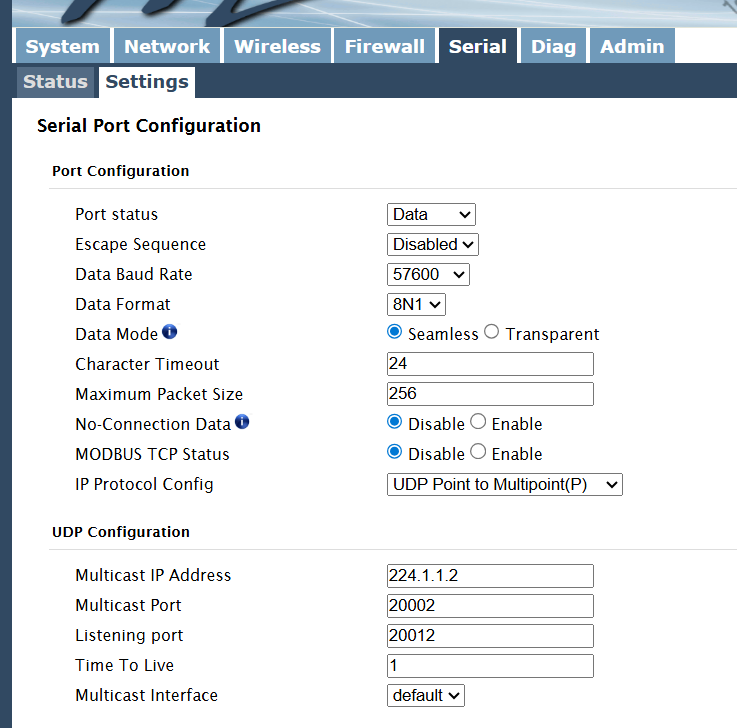
Port Configuration¶
Master と同じ(Data Baud Rate = 57600、IP Protocol = UDP Point to Multipoint)。
UDP Configuration¶
| 項目 | 値 |
|---|---|
| Multicast IP Address | 224.1.1.2 |
| Multicast Port | 20002 |
| Listening port | 20012 |
| Time To Live | 1 |
| Multicast Interface | default |
⚠️ 重要な違い:Slave 側は Listening port = 20012 を持ち、Master の Remote port = 20012 に対応します。
TX Power 調整(重要な操作のコツ)¶
近距離テスト vs 飛行テスト — TX Power は必ず変える
近距離テスト(機体と地上が数十センチから数メートル以内)時に TX Power が大きすぎると、無線飽和(saturation) が発生します — RX 側が自家発射端で「打ち負け」、逆に信号を受信できなくなります。
推奨 TX Power 設定:
| シナリオ | 推奨 TX Power |
|---|---|
| 卓上ループバックテスト(< 1 メートル) | 10 dBm |
| 近距離機能テスト(1〜10 メートル) | 15 dBm |
| 正式飛行(50 メートル以上) | 30 dBm |
設定パス:Microhard 管理インターフェース → Wireless → RF → Tx Power:

フライトコントローラー側配線(SparkNavi Blue)¶
Slave 側 Microhard モジュールの TELEM ポートを SparkNavi Blue TELEM1 コネクタに接続:
| Pin | 信号 | SparkNavi Blue TELEM1 |
|---|---|---|
| 1 | +5V | +5V |
| 2 | TX (VD-Link → FC) | RX |
| 3 | RX (FC → VD-Link) | TX |
| 6 | GND | GND |
ArduPilot SERIAL1(TELEM1)パラメータ¶
| パラメータ | 値 | 説明 |
|---|---|---|
SERIAL1_PROTOCOL |
2 (MAVLink2) |
TELEM1 プロトコル |
SERIAL1_BAUD |
57 (57600) |
TELEM1 ボーレート(Microhard 設定と一致) |
地上側 GCS 接続¶
Mission Planner 遠隔測定リンク¶
接続設定:
- 接続タイプ:UDP
- Listen Port:
20002(Multicast Port に対応)
Connect をクリック、SparkNavi Blue の MAVLink ハートビートを受信するはずです。
HUD にフライトデータが表示されるはずです:

映像ストリーミング(RTSP)¶
Sky 側 IP カメラ(WAN ポートに接続)は NDIS ネットワーク経由で地上 PC にストリーミングします。デフォルト RTSP URL:
rtsp://admin:admin@192.168.168.88/11
(IP は IP カメラの設定によりますが、上記は典型的な例です)
GStreamer による映像表示(Windows + NVIDIA GPU)¶
3 つのコマンド例(用途別)。信号断後の再接続にすべて対応:
方法 1:標準 D3D11(Windows DirectX、互換性最良)¶
gst-launch-1.0.exe rtspsrc location=rtsp://admin:admin@192.168.168.88/11 protocols=udp latency=0 drop-on-latency=true ! rtph264depay ! h264parse ! nvh264dec ! d3d11videosink sync=false async=false qos=false
方法 2:OpenGL 出力(レイテンシがわずかに低い)¶
gst-launch-1.0.exe rtspsrc location=rtsp://admin:admin@192.168.168.88/11 protocols=udp latency=0 drop-on-latency=true ! rtph264depay ! h264parse ! nvh264dec ! glimagesink sync=false async=false qos=false
方法 3:CUDA 直接 GL 出力(NVIDIA カードで最低レイテンシ)¶
gst-launch-1.0.exe rtspsrc location=rtsp://admin:admin@192.168.168.88/11 protocols=udp latency=0 drop-on-latency=true ! rtph264depay ! h264parse ! nvh264dec cuda-device-id=0 ! cudadownload ! glimagesink sync=false async=false qos=false
環境要件¶
- GStreamer 1.0+:公式ダウンロード
- インストール時に MSVC + Complete パッケージを選択
nvh264dec(NVIDIA Video Codec SDK)を含む
AMD グラフィックや Intel 内蔵 GPU を使用する場合は、nvh264dec を以下に置き換えてください:
- AMD:d3d11h264dec
- Intel QuickSync:mfh264dec
FAQ¶
Q: Mission Planner が UDP パケットを受信しない?
A: 確認事項:
1. Master と Slave の Multicast IP / Port が一致しているか
2. ファイアウォールが UDP ポート 20002 をブロックしていないか
3. Slave Microhard が実際にシリアルデータを受信しているか(Microhard Web UI の Serial Status を確認)
4. SparkNavi Blue の SERIAL1_PROTOCOL = 2、SERIAL1_BAUD = 57 が正しいか
Q: 卓上テスト時、Mission Planner の接続が断続的になる?
A: それは TX Power 飽和 です。10〜15 dBm に下げてください — 上記 TX Power セクションを参照。
Q: Windows で NDIS デバイスが表示されない?
A: 確認: 1. USB Type-C ケーブルがデータ転送をサポートしているか(一部の USB-C ケーブルは充電専用) 2. デバイスマネージャー → ネットワークアダプタに「リモート NDIS 互換デバイス」があるか 3. USB を再接続して 10 秒待つ
Q: gst-launch が黒画面?
A: 確認:
1. RTSP IP / 認証情報が正しいか(カメラのデフォルトは通常 admin:admin、Microhard の admin:sparknavi ではない)
2. カメラパス /11 がメインストリーム、/12 は通常サブストリーム
3. ファイアウォールが UDP をブロックしていないか
Q: なぜ Point-to-Point ではなく Multipoint?
A: Multipoint モードでは、複数の地上 GCS が同時に同じ機体からのデータを受信できます(指揮センター + オペレーター + 監視 PC が同時接続)。