空速計設定¶
空速計是定翼機(Plane / VTOL)飛行不可或缺的感測器,提供相對於空氣的速度資訊。SparkNavi Blue 同時支援類比空速計與數位空速計(I2C)。
類比空速計設定¶
硬體接線¶
將類比空速計接於 SparkNavi Blue 的 ADC 連接器:
| Pin | 信號 | 接到空速計 |
|---|---|---|
| 1 | +5V | VCC |
| 2 | ADC | OUT(類比訊號) |
| 3 | GND | GND |

連接器上的「ANA」即 analog 訊號輸出腳,對應飛控的 ADC 輸入。
ArduPilot 參數設定¶
| 參數 | 數值 | 說明 |
|---|---|---|
ARSPD_TYPE |
2 (Analog) |
類比型態 |
ARSPD_PIN |
18 |
SparkNavi Blue 專屬類比腳位 |
ARSPD_USE |
1 |
啟用空速計用於控制 |
⚠️ ARSPD_PIN = 18 的由來:對應 SparkNavi Blue 上的 PA4(ADC1_6V6_IN),即 ADC1 的 PIN 18。Mission Planner 下拉選單中可能不會出現 18 這個選項,直接手動輸入即可。
校正¶
- 設定完上述參數
- 重啟飛控
- 用嘴對著皮托管(Pitot Tube)的 Dynamic 孔輕吹,Mission Planner HUD 上的 AS(Airspeed)應有變化即代表設定成功
數位空速計設定(MS5525)¶
硬體接線¶
將 MS5525 數位空速計接於 SparkNavi Blue 的 I2C 外部埠:
| Pin | 信號 |
|---|---|
| 1 | +5V |
| 2 | I2C2_SCL |
| 3 | I2C2_SDA |
| 4 | GND |
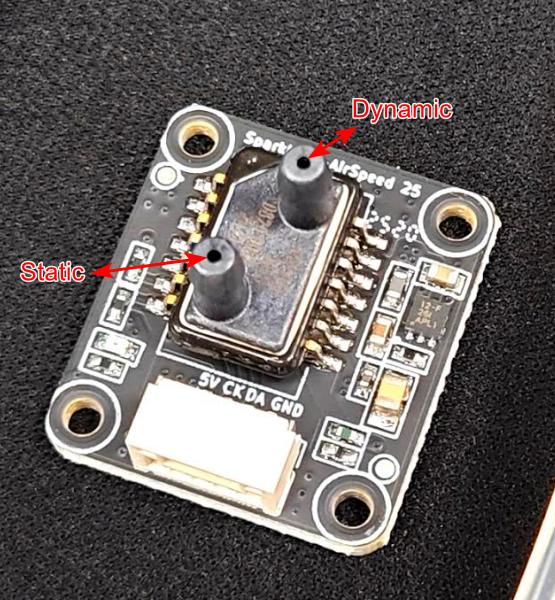
Pitot 管路接法¶
以下圖為例,Static(靜壓)接皮托管的側孔,Dynamic(動壓)接皮托管的前端孔:
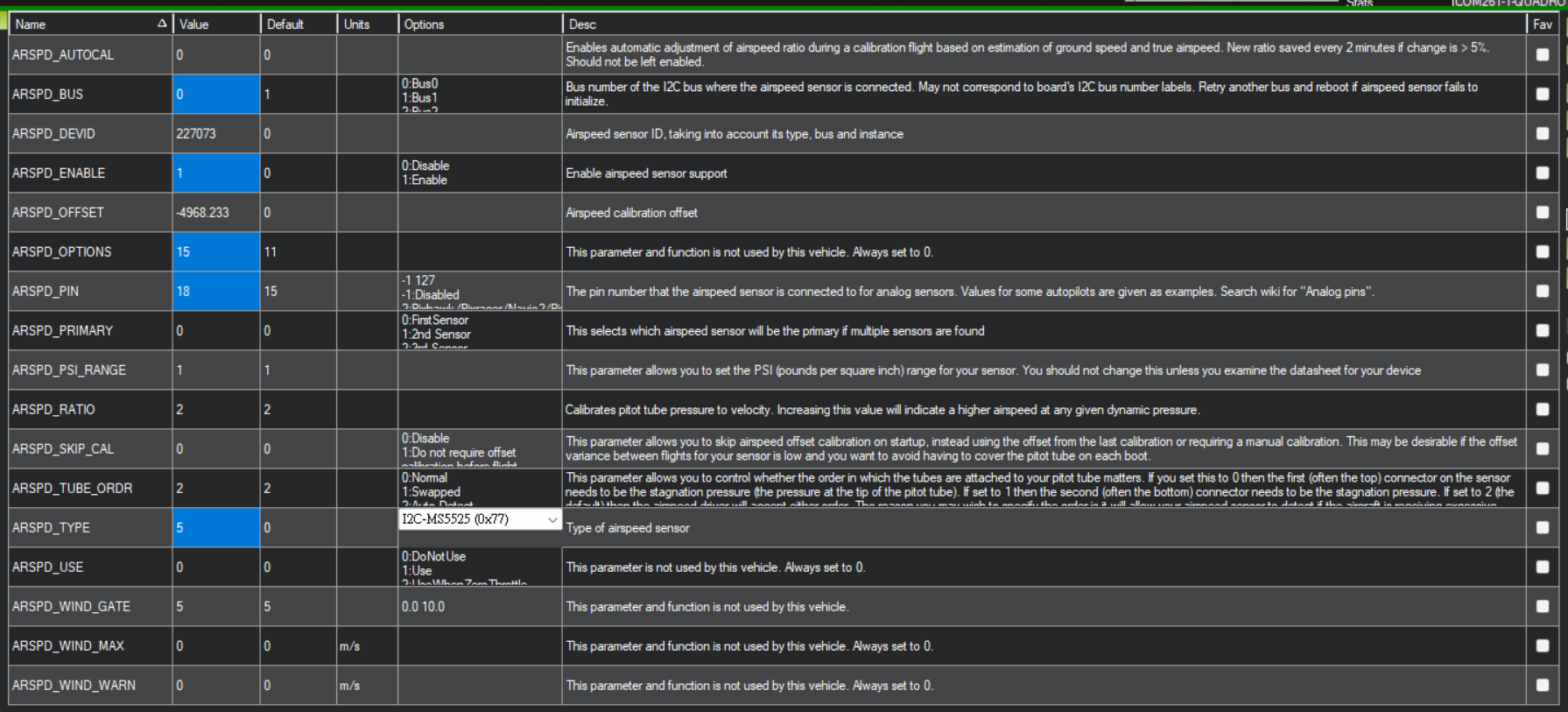
ArduPilot 參數設定¶
ARSPD_BUS = 0
ARSPD_OPTIONS = 15
ARSPD_PIN = 18
ARSPD_TYPE = 5 (I2C-MS5525, 0x77)
詳細參數表:
為何 ARSPD_BUS = 0?¶
SparkNavi Blue 的 hwdef 設計中,I2C2 設為第一順位(因為外接 I2C 設備優先級高)。所以 ARSPD_BUS = 0 對應的是物理上的 I2C2 外部埠,不是 0 號就一定是 I2C0。
I2C 位址衝突注意¶
- SPL06 氣壓計的 I2C 位址是 0x76
- MS5525 預設 I2C 位址也是 0x76 → 與 SPL06 衝突
- 將 MS5525 改成 0x77 以避免衝突
- 若使用其他飛控不會有 SPL06,則 MS5525 用 0x76 即可
數位空速計校正流程¶
設定完參數後,進行校正:
1. 清除既有校正值¶
ARSPD_SKIP_CAL = 0 ← 暫時關閉跳過校正
ARSPD_OFFSET = 0 ← 清空既有 offset
按 Write Params 存檔。
2. 進行校正¶
- 按住皮托管的 Pitot tube 開口(讓空氣不要進去)
- 讓 SparkNavi Blue 重新開機(Reboot)
- 開機後查看 Mission Planner HUD,AS 數值應為 0 m/s
3. 確認校正完成¶
於參數頁面查看,如果 ARSPD_OFFSET 已自動填入非 0 數值,代表校正成功。
4. 鎖定校正¶
ARSPD_SKIP_CAL = 1 ← 開啟跳過校正,後續啟動沿用本次校正值
HUD 顯示驗證¶
校正完成後,於 Mission Planner HUD 左上角應該能看到 AS(Airspeed)即時數值:

對著皮托管 Dynamic 孔吹氣,AS 數值應該即時變化(例如 12.5 m/s)。
常見問題¶
Q: 設定後 AS 一直為 0?
A: 檢查:
1. ARSPD_USE = 1 是否啟用
2. I2C 接線是否正確
3. 皮托管的 Static 與 Dynamic 接管沒有接反
4. 數位空速計 I2C 位址是否與其他模組衝突(改 0x77)
Q: 為何重啟後 ARSPD_OFFSET 沒有自動填入?
A: 校正流程必須是 「先關閉風流 → 再重啟」,順序錯誤會失敗。
Q: AS 與 GS(地速)差異很大?
A: 那是有風的影響(逆風時 AS > GS,順風時 AS < GS)。這是正常現象 — 空速計量的是相對於空氣的速度,GPS 量的是相對於地面的速度。