VL53L1X 測距感測器設定¶
VL53L1X 是 STMicroelectronics 推出的 I2C 介面 ToF(Time-of-Flight)雷射測距模組,有效測距 4 公尺,常用於低空著陸輔助。
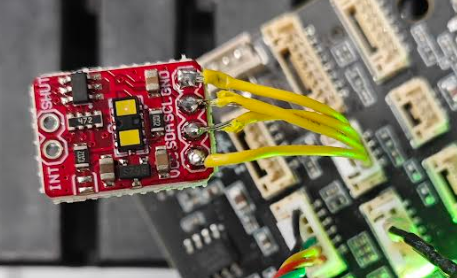
硬體接線¶
將 VL53L1 模組接於 SparkNavi Blue 的 I2C 外部埠:
I2C 連接器腳位:
| Pin | 信號 | 對應 VL53L1X |
|---|---|---|
| 1 | +5V | VCC |
| 2 | I2C2_SCL | SCL |
| 3 | I2C2_SDA | SDA |
| 4 | GND | GND |
ArduPilot 參數設定¶
於 Mission Planner Config → Full Parameter List 設定:
| 參數 | 數值 | 說明 |
|---|---|---|
RNGFND2_TYPE |
16 (VL53L1X) |
測距感測器型態 |
RNGFND2_ADDR |
41 |
I2C 位址(0x29 = 41,VL53L1X 預設) |
RNGFND2_MIN_CM |
5 |
最小有效距離 |
RNGFND2_MAX_CM |
1200 |
最大有效距離 |
RNGFND2_ORIENT |
25 (Downward) |
朝下 |
RNGFND2_GNDCLEAR |
10 |
安裝離地高度(cm) |

為何使用 RNGFND2 而非 RNGFND1¶
如果你已經使用 MTF-01 光流 作為主要測距(RNGFND1),VL53L1X 可作為 第二測距感測器(RNGFND2),用於精準著陸或冗餘設計。
如果只用 VL53L1X 而沒有光流,則改設 RNGFND1_TYPE = 16 即可。
驗證¶
重啟飛控後,於 Mission Planner Status 頁面應能看到 sonarrange2(或 sonarrange,視 RNGFND 編號)即時數據。
將模組從近距離(5 cm)移動到遠距離(1 公尺以上),數值應該對應變化。