VD-Link 影像 / 數據傳輸設定¶
SparkNavi VD-Link-S 是一款基於 Microhard 系列無線模組的 雙頻(2.4 GHz + 900 MHz) 長距離無線數據鏈,有效距離 5 公里,可同時傳輸:
- 遙測資料(MAVLink,從 SparkNavi Blue 飛控)
- 可見光 IP Camera 影像(透過 WAN 埠)
- 熱像儀 / 紅外攝影機影像(透過 LAN 埠)
本指南涵蓋從硬體接線、Microhard 設定、影像串流到 TX Power 調整的完整流程。

⚠️ 重要安全警告(必讀)¶
接錯接頭會永久損壞飛控
VD-Link 的 TELEM、WAN、LAN 三個接口均具備電壓輸出功能,且皆採用相同的 GH1.25 連接器規格。
嚴禁將 WAN 或 LAN 接頭接到飛控的 TELEM1 / TELEM2 端口,此操作將導致飛控系統永久損壞。
接線時請務必確認接頭標籤與腳位定義,只有 TELEM 接頭可以連接到 SparkNavi Blue 的 TELEM1。
系統架構¶
VD-Link 採用 Sky 端(機體)+ Ground 端(地面 GCS)雙模組設計,所有訊號皆採 AES 加密:
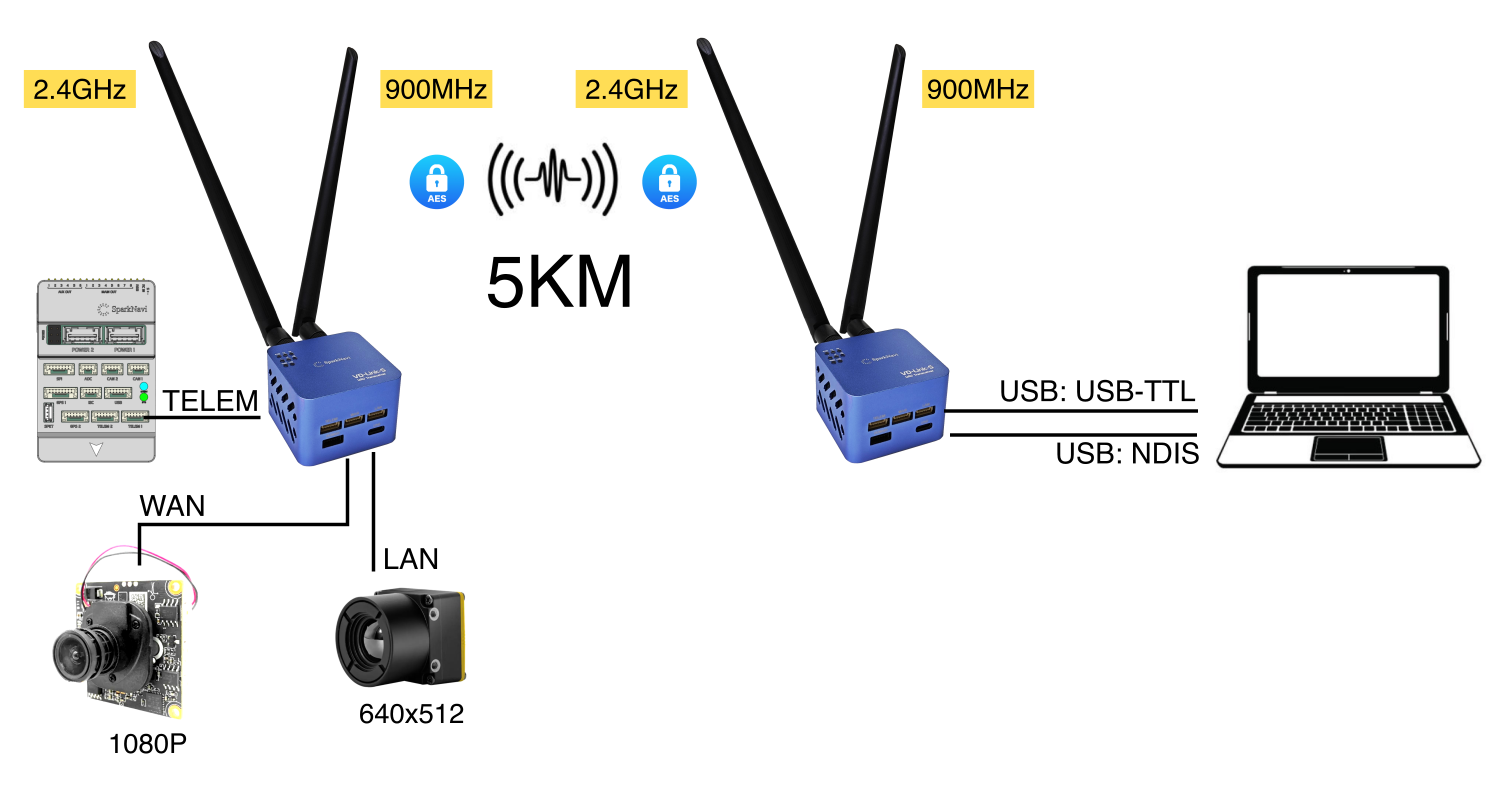
| 元件 | 機體端 | 地面端 |
|---|---|---|
| 飛控 | SparkNavi Blue → TELEM | — |
| 1080P IP 攝影機 | → WAN | — |
| 640×512 熱像儀 | → LAN | — |
| GCS PC | — | USB-TTL(遙測)/ USB-NDIS(影像) |
硬體接口配置¶
VD-Link 模組底面接口:
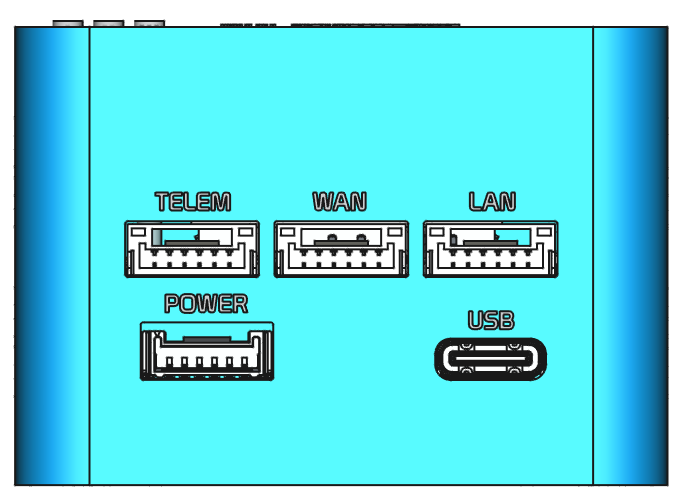
| 接口 | 用途 | 接頭規格 |
|---|---|---|
| TELEM | 飛控遙測(連接 SparkNavi Blue) | GH1.25 6-pin |
| WAN | IP Camera(可見光) RTSP格式 | GH1.25 6-pin,有 +12V 輸出 |
| LAN | 熱像儀 / 第二種影像 RTSP格式 | GH1.25 6-pin,有 +12V 輸出 |
| POWER | 電源輸入(最高 +55V / 12S) | GH1.25 |
| USB | 地面端 USB Type-C(NDIS 網路 + USB-TTL 遙測) | USB-C |
天線指派¶
| 天線埠 | 頻段 |
|---|---|
| ANT1 | 2.4 GHz |
| ANT2 | 900 MHz |
雙頻設計可避免單頻干擾,任一頻段失效時自動切換另一頻段。
完整接線圖¶
機體端典型接線:SparkNavi Blue + 可見光 IP Camera + 熱像儀

腳位定義(每個 GH1.25 接頭):
| Pin | TELEM | WAN | LAN | POWER |
|---|---|---|---|---|
| 1 | +5V | +12V | +12V | BAT+ |
| 2 | RX (Input) | TX+ | TX+ | BAT+ |
| 3 | TX (Output) | TX- | TX- | BAT+ |
| 4 | × | RX+ | RX+ | GND |
| 5 | × | RX- | RX- | GND |
| 6 | GND | GND | GND | GND |
⚠️ 再次提醒:WAN / LAN 第 1 腳是 +12V 輸出(為攝影機供電用),如果誤接到飛控 TELEM,12V 會直接打到飛控的 5V 邏輯電路。
管理介面登入¶
地面端 VD-Link 透過 USB Type-C 連接電腦後,Windows 會自動辨識為 遠端 NDIS 相容裝置,並自動取得 IP(通常為 192.168.168.x 網段)。
NDIS 鏈路速度可達 425 Mbps,足以承載雙光高解析度影像:

開啟瀏覽器,進入 Microhard 管理介面:
| 項目 | 預設值 |
|---|---|
| 網址 | http://192.168.168.1(以設備底部標籤為主) |
| 帳號 | admin |
| 密碼 | sparknavi |
首次登入後請立即更換預設密碼
出貨時的預設密碼為公開資訊。正式部署前請務必到 Admin → Change Password 修改,否則任何能進入同網段的人都可操作你的鏈路。
Microhard Master 設定(地面端)¶
進入 Microhard 管理介面 → Serial → Settings:
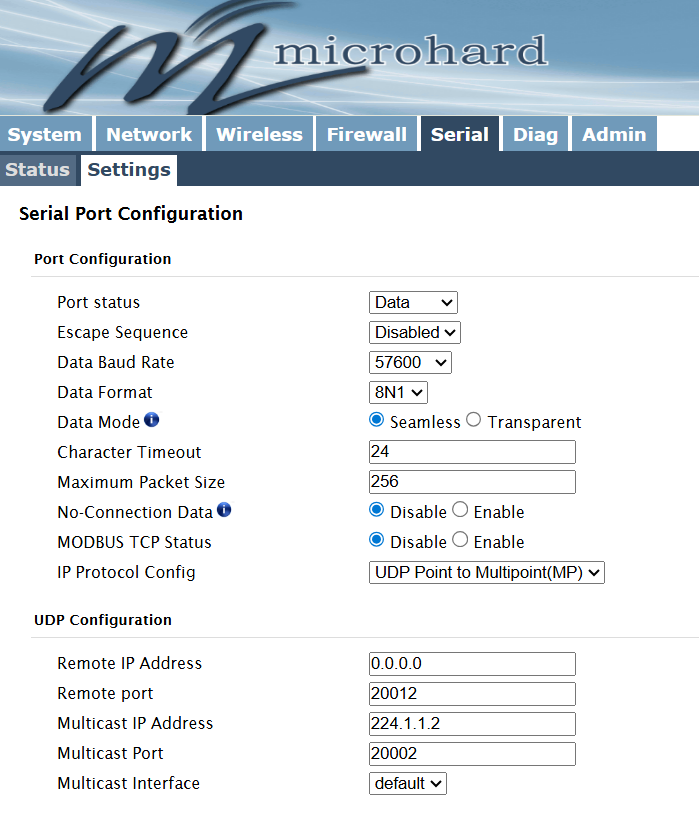
Port Configuration¶
| 項目 | 數值 |
|---|---|
| Port status | Data |
| Escape Sequence | Disabled |
| Data Baud Rate | 57600 |
| Data Format | 8N1 |
| Data Mode | Seamless |
| Character Timeout | 24 |
| Maximum Packet Size | 256 |
| No-Connection Data | Disable |
| MODBUS TCP Status | Disable |
| IP Protocol Config | UDP Point to Multipoint(MP) |
UDP Configuration¶
| 項目 | 數值 |
|---|---|
| Remote IP Address | 0.0.0.0 |
| Remote port | 20012 |
| Multicast IP Address | 224.1.1.2 |
| Multicast Port | 20002 |
| Multicast Interface | default |
Microhard Slave 設定(機體端)¶
機體端 VD-Link 進入 Microhard 管理介面 → Serial → Settings:
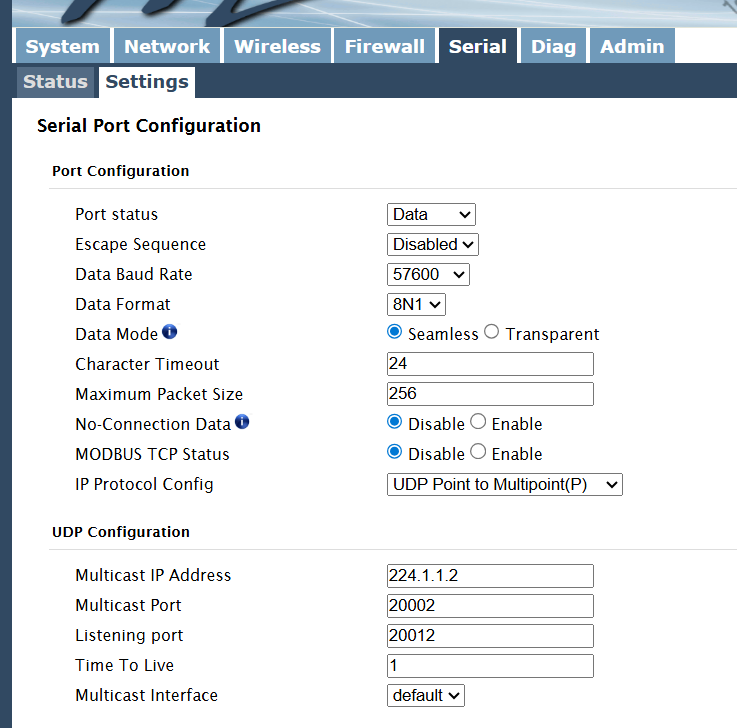
Port Configuration¶
與 Master 相同(Data Baud Rate = 57600, IP Protocol = UDP Point to Multipoint)。
UDP Configuration¶
| 項目 | 數值 |
|---|---|
| Multicast IP Address | 224.1.1.2 |
| Multicast Port | 20002 |
| Listening port | 20012 |
| Time To Live | 1 |
| Multicast Interface | default |
⚠️ 關鍵差異:Slave 端有 Listening port = 20012,對應 Master 的 Remote port = 20012。
TX Power 調整(重要操作技巧)¶
近距離測試 vs 正式飛行 — TX Power 必須不同
近距離測試(機體與地面相隔幾十公分到幾公尺)時,如果 TX Power 太大,會發生無線電飽和(Saturation) — RX 端被自家發射端「打飽」,反而收不到訊號。
建議的 TX Power 設定:
| 情境 | 建議 TX Power |
|---|---|
| 桌上對連測試(< 1 公尺) | 10 dBm |
| 近距離功能測試(1–10 公尺) | 15 dBm |
| 正式飛行(50 公尺以上) | 30 dBm |
設定路徑:Microhard 管理介面 → Wireless → RF → Tx Power:

飛控端接線(SparkNavi Blue)¶
將 Slave 端 Microhard 模組的 TELEM 接頭接到 SparkNavi Blue 的 TELEM1 連接器:
| Pin | 信號 | SparkNavi Blue TELEM1 |
|---|---|---|
| 1 | +5V | +5V |
| 2 | TX (VD-Link → FC) | RX |
| 3 | RX (FC → VD-Link) | TX |
| 6 | GND | GND |
ArduPilot SERIAL1(TELEM1)參數¶
| 參數 | 數值 | 說明 |
|---|---|---|
SERIAL1_PROTOCOL |
2 (MAVLink2) |
TELEM1 協定 |
SERIAL1_BAUD |
57 (57600) |
TELEM1 鮑率(對應 Microhard 設定) |
地面端 GCS 連線¶
Mission Planner 遙測連線¶
連線設定:
- 連線類型:UDP
- Listen Port:
20002(對應 Multicast Port)
按 Connect,正常情況應接收到 SparkNavi Blue 的 MAVLink 心跳。
HUD 應顯示飛控資料:

影像串流(RTSP)¶
VD-Link Sky 端 IP Camera(WAN 埠連接)透過 NDIS 網路傳到地面 PC。預設 RTSP 串流位址:
rtsp://admin:admin@192.168.168.88/11
(IP 位址視 IP Camera 設定而定,以上為典型範例)
使用 GStreamer 顯示影像(Windows + NVIDIA 顯卡)¶
以下三種指令適用於不同情境,斷訊後恢復皆可繼續顯示(支援自動重連):
方案 1:標準 D3D11(Windows DirectX,相容性最佳)¶
gst-launch-1.0.exe rtspsrc location=rtsp://admin:admin@192.168.168.88/11 protocols=udp latency=0 drop-on-latency=true ! rtph264depay ! h264parse ! nvh264dec ! d3d11videosink sync=false async=false qos=false
方案 2:OpenGL 輸出(延遲略低)¶
gst-launch-1.0.exe rtspsrc location=rtsp://admin:admin@192.168.168.88/11 protocols=udp latency=0 drop-on-latency=true ! rtph264depay ! h264parse ! nvh264dec ! glimagesink sync=false async=false qos=false
方案 3:CUDA 直接到 GL(NVIDIA 卡延遲最低)¶
gst-launch-1.0.exe rtspsrc location=rtsp://admin:admin@192.168.168.88/11 protocols=udp latency=0 drop-on-latency=true ! rtph264depay ! h264parse ! nvh264dec cuda-device-id=0 ! cudadownload ! glimagesink sync=false async=false qos=false
環境需求¶
- GStreamer 1.0+:官方下載
- 安裝時選擇 MSVC + Complete 套件
- 包含
nvh264dec(NVIDIA Video Codec SDK)
如果你使用 AMD 顯卡或 Intel 內顯,把 nvh264dec 換成:
- AMD:d3d11h264dec
- Intel QuickSync:mfh264dec
常見問題¶
Q: Mission Planner 連 UDP 沒反應?
A: 檢查:
1. Master 與 Slave 的 Multicast IP / Port 必須一致
2. 防火牆是否擋了 UDP 20002 埠
3. Slave 端 Microhard 是否實際接收到飛控的 Serial 資料(看 Microhard Web 介面 Serial Status)
4. SparkNavi Blue 的 SERIAL1_PROTOCOL = 2、SERIAL1_BAUD = 57 是否正確
Q: 桌上測試時,Mission Planner 會時斷時續?
A: 這是 TX Power 太強導致無線電飽和。降到 10–15 dBm 即可,參考上面 TX Power 章節。
Q: NDIS 連線不上,Windows 看不到 VD-Link?
A: 確認: 1. USB Type-C 線是支援資料傳輸的(部分 USB-C 線只支援充電) 2. 裝置管理員 → 網路介面卡是否有「遠端 NDIS 相容裝置」 3. 嘗試重新插拔 USB 並等 10 秒
Q: gst-launch 跑起來黑畫面?
A: 檢查:
1. RTSP IP / 帳密是否正確(預設 admin:admin,不是 Microhard 的 admin:sparknavi)
2. Camera 路徑 /11 對應主串流,/12 通常是次串流
3. 防火牆有沒有擋 UDP
Q: 為何用 Multipoint 而不是 Point-to-Point?
A: Multipoint 模式下,多台地面 GCS 可同時接收同一架飛機的資料(指揮中心 + 操作員 + 監控 PC 同時連線)。