VL53L1X Distance Sensor Setup¶
VL53L1X is an STMicroelectronics I2C ToF (Time-of-Flight) laser rangefinder with a 4-meter effective range. Common applications include precision landing assistance.
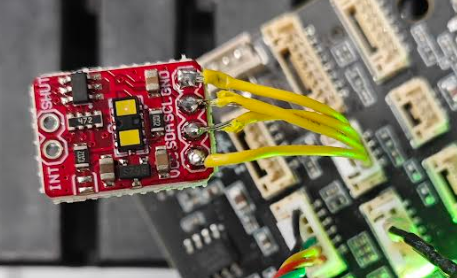
Hardware Wiring¶
Connect VL53L1 to the I2C external port on SparkNavi Blue:
| Pin | Signal | VL53L1X |
|---|---|---|
| 1 | +5V | VCC |
| 2 | I2C2_SCL | SCL |
| 3 | I2C2_SDA | SDA |
| 4 | GND | GND |
ArduPilot Parameters¶
In Mission Planner Config → Full Parameter List:
| Parameter | Value | Description |
|---|---|---|
RNGFND2_TYPE |
16 (VL53L1X) |
Rangefinder type |
RNGFND2_ADDR |
41 |
I2C address (0x29 = 41, VL53L1X default) |
RNGFND2_MIN_CM |
5 |
Minimum range |
RNGFND2_MAX_CM |
1200 |
Maximum range |
RNGFND2_ORIENT |
25 (Downward) |
Pointing down |
RNGFND2_GNDCLEAR |
10 |
Mounting height above ground (cm) |

Why RNGFND2 Instead of RNGFND1¶
If you already use the MTF-01 optical flow as the primary rangefinder (RNGFND1), VL53L1X works as a secondary rangefinder (RNGFND2) for precision landing or redundancy.
If using only VL53L1X without optical flow, set RNGFND1_TYPE = 16 instead.
Verification¶
After reboot, sonarrange2 (or sonarrange depending on RNGFND number) should appear live in Mission Planner Status.
Move the module from a few centimeters to a meter or more away — the value should respond.